
基于激光测距汽车防撞系统设计毕业论文
时间:2024-10-05 来源:网络 人气:
摘要
随着汽车数量的不断增加,交通事故的发生率也在逐年上升。为了提高行车安全,本文设计了一种基于激光测距的汽车防撞系统。该系统利用激光测距原理,实时监测车辆与周围障碍物之间的距离,并在距离过近时发出警报,从而有效预防交通事故的发生。本文详细介绍了系统的设计原理、硬件组成、软件设计以及实验验证过程。
关键词
激光测距;汽车防撞;系统设计;安全驾驶
1. 引言
随着我国经济的快速发展,汽车已经成为人们出行的主要交通工具。随着汽车数量的不断增加,交通事故的发生率也在逐年上升。据统计,每年因交通事故导致的死亡人数高达数万人。因此,提高行车安全,预防交通事故的发生,已成为当前亟待解决的问题。
传统的汽车防撞系统主要依靠超声波、雷达等传感器进行测距,但这些传感器在恶劣天气条件下容易受到干扰,且测距精度较低。而激光测距技术具有测距精度高、抗干扰能力强等优点,因此,本文提出了一种基于激光测距的汽车防撞系统,以提高行车安全。
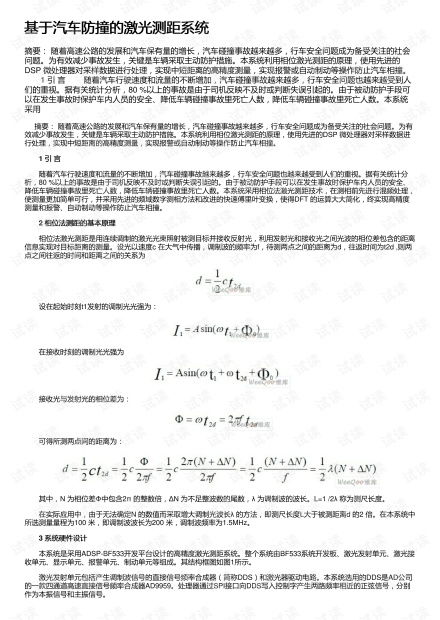
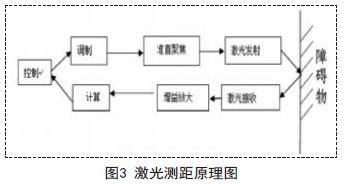
2. 系统设计原理
基于激光测距的汽车防撞系统主要包括激光发射器、激光接收器、信号处理模块、报警模块和显示模块等部分。
激光发射器负责发射激光脉冲,激光接收器负责接收反射回来的激光脉冲。信号处理模块对接收到的激光脉冲信号进行处理,计算出激光脉冲的飞行时间,从而得到车辆与障碍物之间的距离。当距离小于设定阈值时,报警模块发出警报,提醒驾驶员注意安全。显示模块则将测距结果实时显示在驾驶员视线范围内。
3. 硬件设计

3.1 激光发射器
激光发射器采用低功耗、高稳定性的激光二极管作为光源,通过驱动电路控制激光二极管的开关,实现激光脉冲的发射。
3.2 激光接收器
激光接收器采用光电二极管作为光电转换元件,将接收到的激光脉冲转换为电信号,经过放大、滤波等处理后,送入信号处理模块。
3.3 信号处理模块
信号处理模块采用高速单片机作为核心处理单元,对激光接收器送来的电信号进行处理,计算出激光脉冲的飞行时间,从而得到车辆与障碍物之间的距离。
3.4 报警模块
报警模块采用蜂鸣器和LED灯作为报警输出,当距离小于设定阈值时,发出警报声和闪烁的LED灯,提醒驾驶员注意安全。
3.5 显示模块
显示模块采用液晶显示屏,将测距结果实时显示在驾驶员视线范围内,方便驾驶员了解车辆与障碍物之间的距离。
4. 软件设计

软件设计主要包括激光脉冲发射控制程序、信号处理程序、报警程序和显示程序等。
4.1 激光脉冲发射控制程序
激光脉冲发射控制程序负责控制激光二极管的开关,实现激光脉冲的发射。
4.2 信号处理程序
信号处理程序负责对激光接收器送来的电信号进行处理,计算出激光脉冲的飞行时间,从而得到车辆与障碍物之间的距离。
4.3 报警程序
报警程序负责在距离小于设定阈值时,发出警报声和闪烁的LED灯,提醒驾驶员注意安全。
4.4 显示程序
显示程序负责将测距结果实时显示在液晶显示屏上,方便驾驶员了解车辆与障碍物之间的距离。
5. 实验验证
为了验证所设计的基于激光测距的汽车防撞系统的性能,进行了以下实验:
5.1 测距精度实验
通过在不同距离下测量系统测距结果,并与实际距离进行对比,验证系统的测距精度。
5.2 抗干扰实验
在恶劣天气条件下,测试系统在雨、雾等环境下的测距性能,验证系统的抗干扰能力。
5.3 报警实验
在距离小于设定阈值时,测试系统是否能够及时发出警报,验证系统的报警功能。
6. 结论
本文设计了一种基于激光测距的汽车防撞系统,通过实验验证
相关推荐



教程资讯
教程资讯排行









