汽车倒车防撞系统设计,提升行车安全的关键技术
时间:2024-10-01 来源:网络 人气:
汽车倒车防撞系统设计:提升行车安全的关键技术

随着汽车数量的不断增加,行车安全成为社会关注的焦点。倒车防撞系统作为一项重要的行车安全辅助技术,能够有效减少倒车时的碰撞事故,提高行车安全性。本文将详细介绍汽车倒车防撞系统的设计原理、技术特点及发展趋势。
一、倒车防撞系统的设计原理

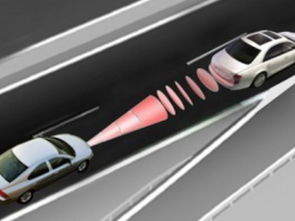
倒车防撞系统主要通过超声波、雷达、摄像头等传感器来检测车辆周围环境,实时获取车辆与障碍物之间的距离信息,并通过中央处理器(CPU)进行处理,最终实现对车辆的预警和辅助控制。
二、倒车防撞系统的技术特点
1. 超声波传感器:超声波传感器具有成本低、安装方便、抗干扰能力强等特点,是目前应用最广泛的倒车防撞传感器。其工作原理是发射超声波信号,当信号遇到障碍物时,反射回来,通过计算发射和接收信号的时间差来测量距离。
2. 雷达传感器:雷达传感器具有探测距离远、抗干扰能力强、不受光线影响等特点,适用于复杂多变的行车环境。其工作原理是发射电磁波,当电磁波遇到障碍物时,反射回来,通过计算发射和接收信号的时间差来测量距离。
3. 摄像头传感器:摄像头传感器具有图像清晰、识别准确等特点,适用于对障碍物进行精确识别。其工作原理是利用摄像头捕捉车辆周围环境图像,通过图像处理技术识别障碍物,并计算距离。
三、倒车防撞系统的设计步骤
1. 确定系统需求:根据车辆类型、使用环境等因素,确定倒车防撞系统的功能、性能和可靠性要求。
2. 选择传感器:根据系统需求,选择合适的传感器,如超声波传感器、雷达传感器或摄像头传感器。
3. 设计电路:根据传感器特性,设计倒车防撞系统的电路,包括传感器电路、信号处理电路、报警电路等。
4. 编写程序:编写倒车防撞系统的控制程序,实现对传感器信号的采集、处理、判断和报警。
5. 调试与优化:对倒车防撞系统进行调试,确保系统稳定可靠,并根据实际需求进行优化。
四、倒车防撞系统的发展趋势
1. 多传感器融合:将超声波、雷达、摄像头等多种传感器进行融合,提高倒车防撞系统的准确性和可靠性。
2. 智能化:利用人工智能技术,实现对障碍物的智能识别和判断,提高倒车防撞系统的智能化水平。
3. 网联化:将倒车防撞系统与车载网络进行连接,实现与其他车载系统的数据共享和协同工作。
4. 低成本:随着技术的不断发展,倒车防撞系统的成本将逐渐降低,使其在更多车型中得到应用。
倒车防撞系统作为一项重要的行车安全辅助技术,对于提高行车安全性具有重要意义。本文详细介绍了倒车防撞系统的设计原理、技术特点、设计步骤和发展趋势,为相关研究人员和工程师提供了有益的参考。
相关推荐

![本机的安卓系统是几,从初识到深度探索——以[本机安卓系统版本]为例](/uploads/allimg/20250419/7-25041ZH014J0.jpg)


教程资讯
教程资讯排行